BOSM -6025 qarama-qarshi boshli burg'ulash mashinasi
1. Uskunalarfoydalanish:
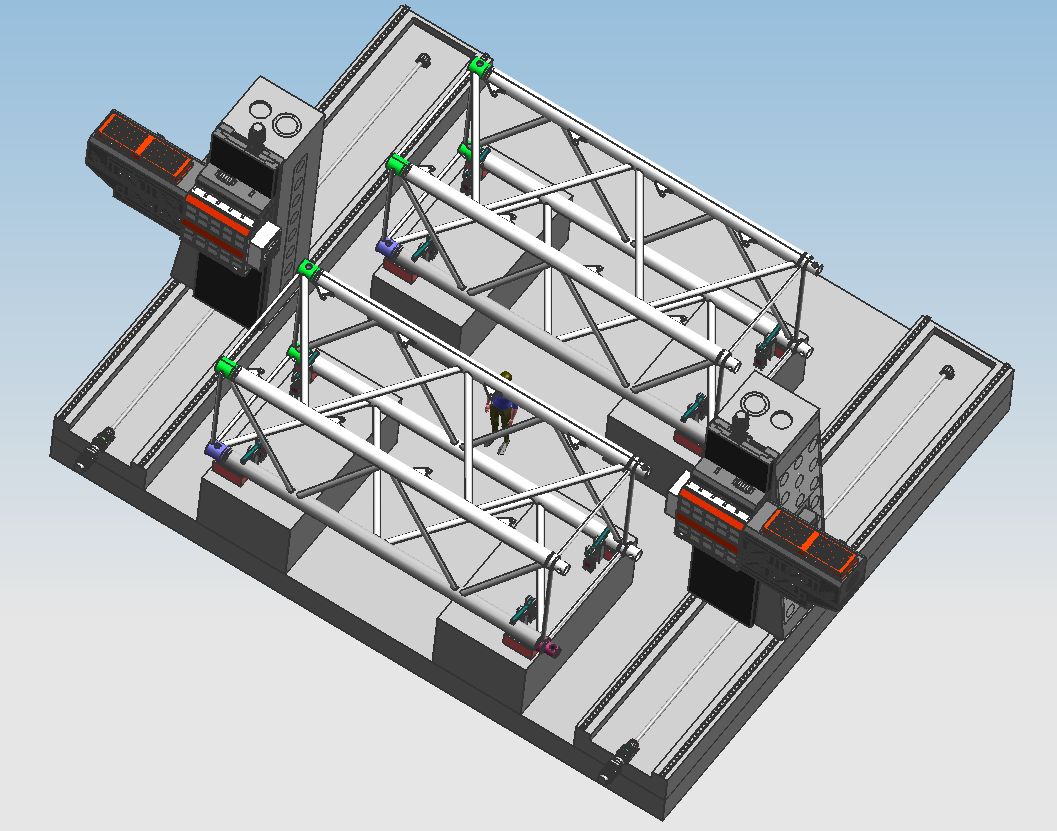
BOSM-6025 er-xotin stantsiyali, CNC vertikal ustunli harakatlanuvchi ikki ustunli boshdan-boshqa burg'ulash va frezalash mashinasi qurilish texnikasining nosimmetrik ish qismlari uchun maxsus dastgohdir. Mashina asbobi maxsus harakatlanuvchi ustun va ikkita gorizontal qo'chqor to'plami bilan jihozlangan bo'lib, ular ish qismini burg'ulash, frezalash, burg'ulash va boshqa ishlov berishni samarali zarba oralig'ida amalga oshirishi mumkin, ishlov beriladigan qism bir vaqtning o'zida qayta ishlanishi mumkin (kerak emas). ikkilamchi siqish uchun), tez yuklash va tushirish tezligi, tez joylashishni aniqlash tezligi, yuqori ishlov berish aniqligi va yuqori ishlov berish samaradorligi.
2. Uskunaning tuzilishi:
2.1. Mashina asbobining asosiy qismlari
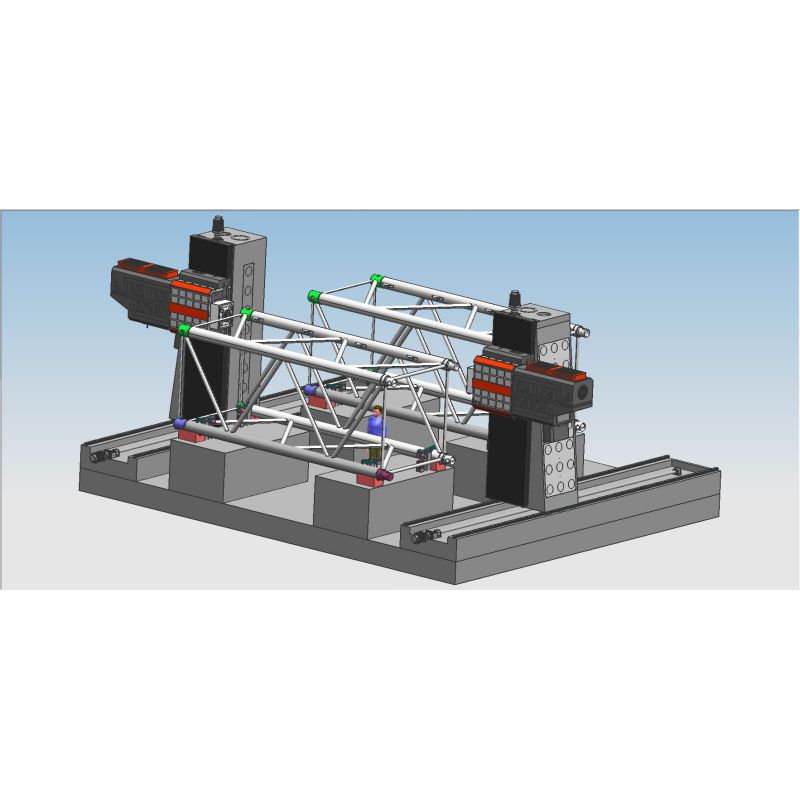
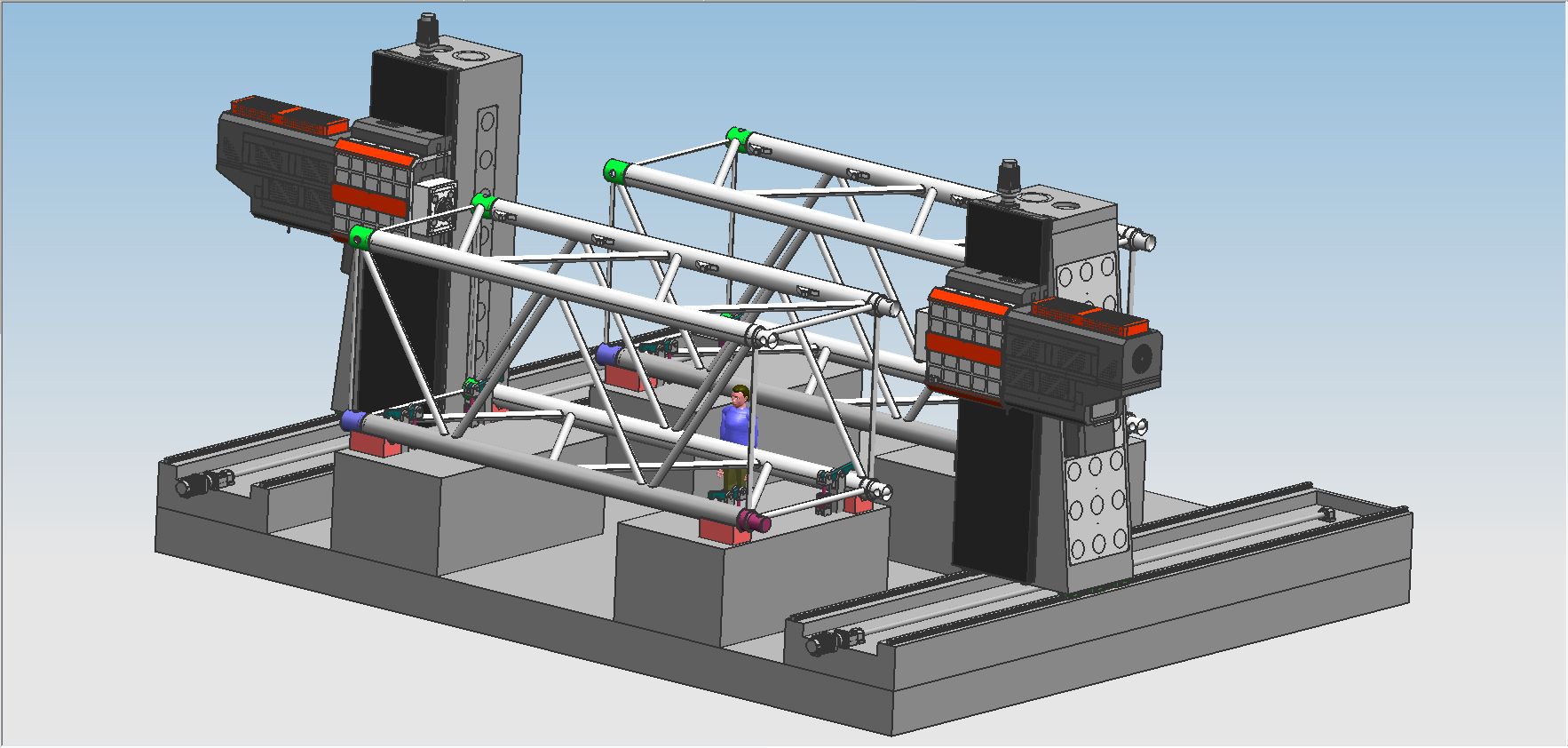
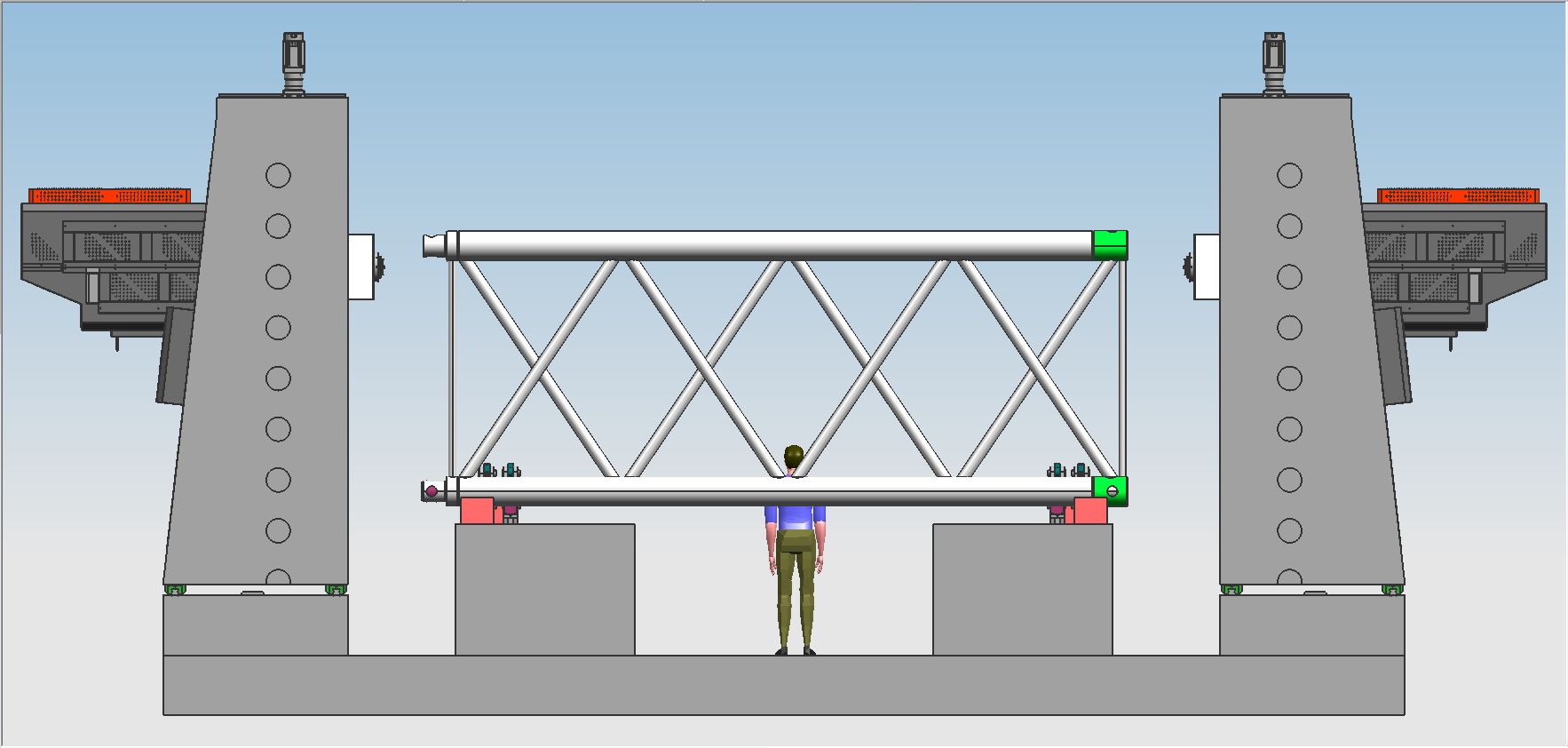
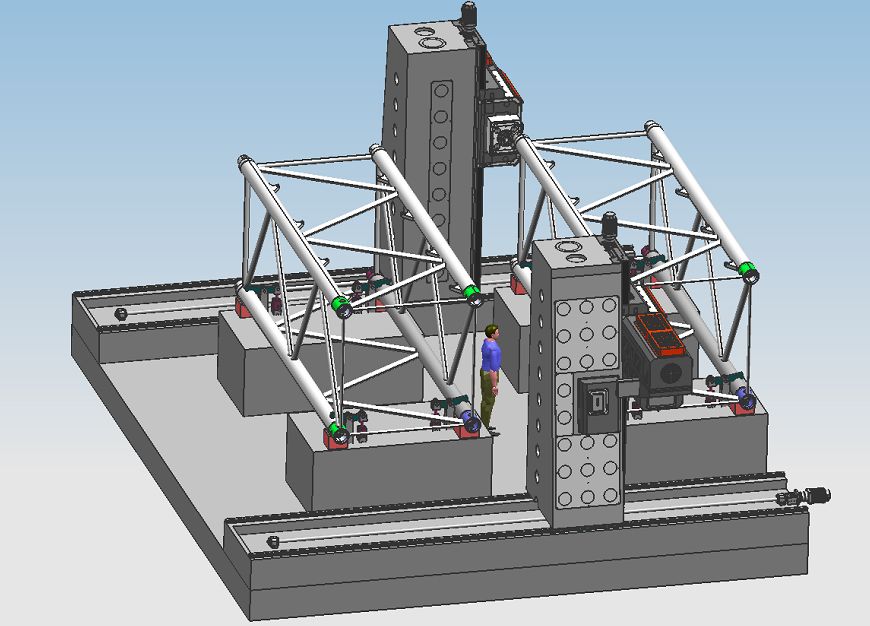
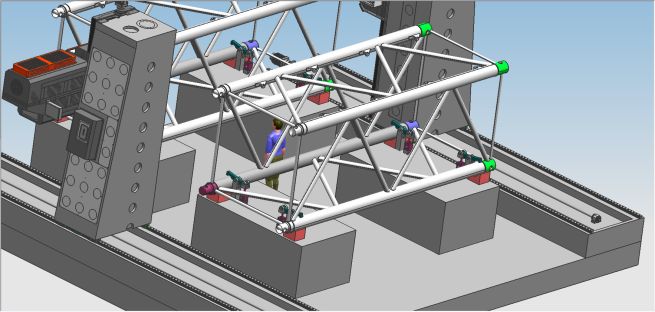
To'shak, dastgoh, chap va o'ng ustunlar, to'sinlar, egarlar, qo'chqorlar va boshqa katta qismlar qatronli qum qolipidan, yuqori sifatli kulrang temirdan 250 quyma, issiq qum chuqurida tavlangan → tebranish qarishi → issiq o'choq tavlanishi → tebranish qarishi → qo'pol ishlov berish → Vibratsiyali qarish → issiq pechning tavlanishi → tebranish qarishi → tugatish, qismlarning salbiy stressini butunlay yo'q qiling va qismlarning ishlashini barqaror ushlab turing. Mashina asbobida frezalash, burg'ulash, burg'ulash, qarama-qarshilik, teginish va boshqalar kabi funktsiyalar mavjud va asbobni sovutish usuli tashqi sovutishdir, dastgohda 6 ta besleme o'qi mavjud bo'lib, ular 4 o'qli ulanishni va 6 o'qli bitta o'qni amalga oshirishi mumkin. harakat. 2 ta quvvat boshi mavjud. Mashina asbobining eksenel yo'nalishi va quvvat boshi quyidagi rasmda ko'rsatilgan.
2. 2Eksenel uzatish besleme qismining asosiy tuzilishi
2.2.1 X 1/X2 o'qi: Ustun qo'zg'almas yotoqning yo'riqnomasi bo'ylab uzunlamasına o'zaro harakatlanadi.
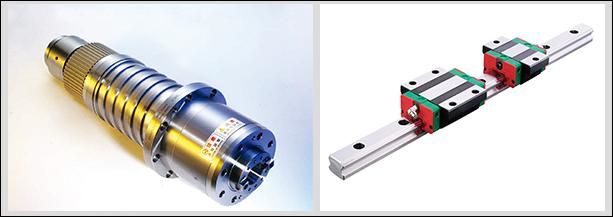
X o'qi uzatish: AC servo vosita va yuqori aniqlikdagi sayyora reduktori X o'qining chiziqli harakatini amalga oshirish uchun ikkita ustunni shar vintli uzatmasi orqali haydash uchun ishlatiladi.
Yo'naltiruvchi rels shakli: ikkita yuqori quvvatli aniq chiziqli hidoyat relslarini yotqiz.
2.2.2 Y1 o'qi: Quvvat boshi va qo'chqor ustunning old tomoniga vertikal ravishda o'rnatiladi va ustunning yo'riqnomasi bo'ylab chapga va o'ngga o'zaro harakatlanadi.
Y1 eksa uzatish: AC servo vosita egarni harakatlantirish uchun shar vintini haydash va Y1 o'qi chiziqli harakatini amalga oshirish uchun ishlatiladi.
Qo'llanma shakli: 4 chiziqli hidoyat relslari + qattiq relsli kvadrat qo'chqor birlashtirilgan.
2.2.3 Y2 o'qi: Quvvat boshining ikkinchi ramkasi ustunning old tomoniga vertikal ravishda o'rnatiladi va ustunning hidoyat ray bo'ylab chapga va o'ngga o'zaro harakatlanadi.
Y2 o'qi uzatish: AC servo vosita egarni harakatga keltirish va Y2 o'qi chiziqli harakatini amalga oshirish uchun shar vintini haydash uchun ishlatiladi.
Qo'llanma shakli: 4 chiziqli hidoyat relslari + qattiq relsli kvadrat qo'chqor birlashtirilgan.
2.2.4 Z1 o'qi: Quvvat boshi toymasin egar vertikal ravishda o'ng ustunning old tomoniga o'rnatiladi va ustun yo'riqnomasi bo'ylab yuqoriga va pastga qarab harakatlanadi.
Z1 eksa uzatish: AC servo vosita va yuqori aniqlikdagi planetar reduktor Z1 eksa chiziqli harakatini amalga oshirish uchun ramni sharli vint orqali harakatlantirish uchun ishlatiladi.
Qo'llanma shakli: 2 chiziqli yo'naltiruvchi relslar.
2.2.5 Z2 o'qi: Quvvat boshi slaydni egari vertikal ravishda o'ng ustunning old tomoniga o'rnatiladi va ustun yo'riqnomasi bo'ylab yuqoriga va pastga o'zaro harakatlanadi.
Z1 o'qi uzatish: AC servo vosita va yuqori aniqlikdagi planetar reduktor Z2 eksa chiziqli harakatini amalga oshirish uchun ramni sharli vint orqali harakatlantirish uchun ishlatiladi.
Qo'llanma shakli: 2 chiziqli yo'naltiruvchi relslar
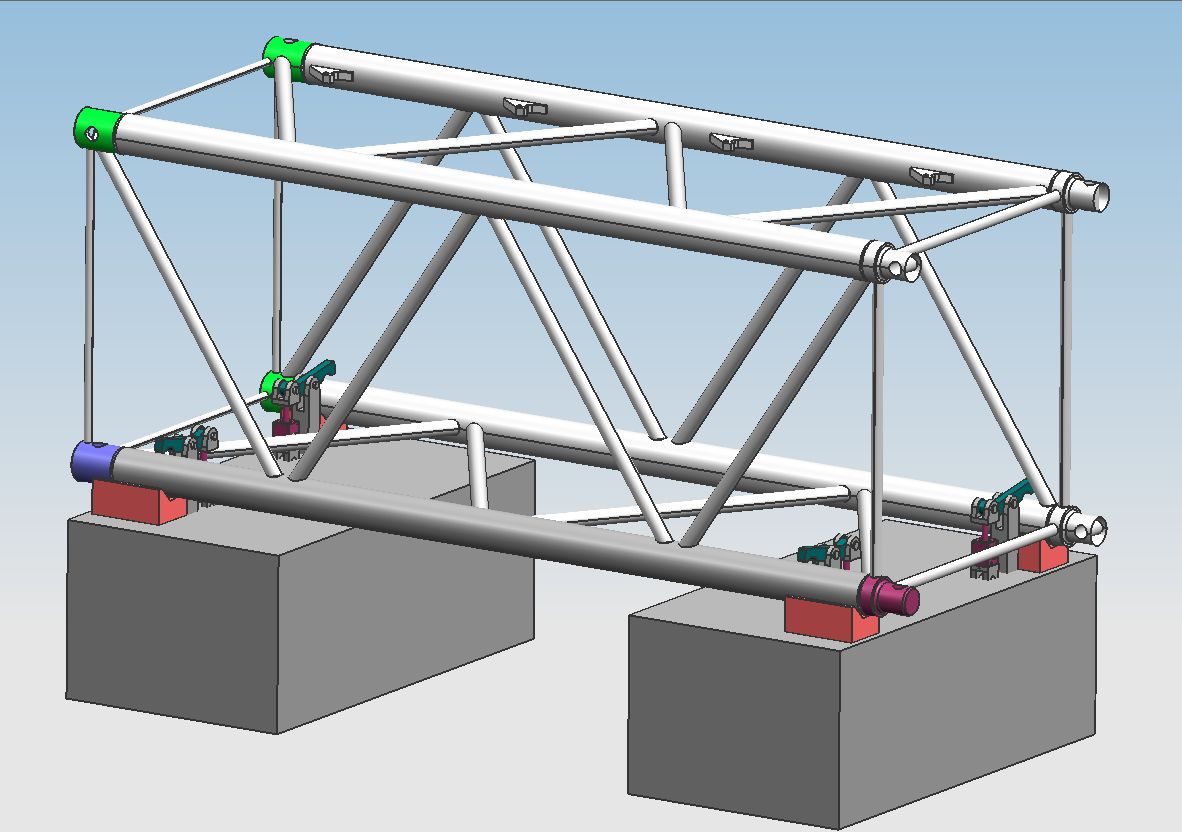
Zerikarli va frezalash quvvati boshi (shu jumladan quvvat boshi 1 va 2) aralash kvadrat qo'chqor bo'lib, harakat yo'nalishi 4 ta chiziqli rolikli hidoyat relslari bilan boshqariladi. Chalg'igan nozik vida juftini haydash uchun AC servo motordan foydalanadi. Mashina azot balansi paneli bilan jihozlangan. , Vint va servo vosita ustidagi mashina boshining yuk ko'tarish qobiliyatini kamaytiring. Z-o'qi dvigateli avtomatik tormoz funktsiyasiga ega. Elektr uzilib qolgan taqdirda, avtomatik tormoz vosita milini aylana olmasligi uchun mahkam ushlab turadi. Ishlayotganda, matkap uchi ishlov beriladigan qismga tegmasa, u tez oziqlanadi; burg'ulash ish qismiga tegsa, u avtomatik ravishda ishchi ozuqaga o'tadi. Matkap uchi ishlov beriladigan qismga kirganda, u avtomatik ravishda tez o'rashga o'tadi; burg'ulash uchi ish qismini tark etib, belgilangan holatga yetganda, u avtomatik aylanishni amalga oshirish uchun keyingi teshik holatiga o'tadi. Va u mehnat unumdorligini oshiradigan ko'r teshiklarni burg'ulash, frezalash, qirqish, chiplarni sindirish, avtomatik chiplarni olib tashlash va hokazo funktsiyalarini amalga oshirishi mumkin.


500 mm zarbli birikma kvadrat qo'chqor quvvat boshi kvadrat qo'chqorning qattiqligini saqlab, yo'naltirish aniqligini sezilarli darajada yaxshilash uchun an'anaviy qo'shimchalar o'rniga chiziqli qo'llanmalardan foydalanadi.
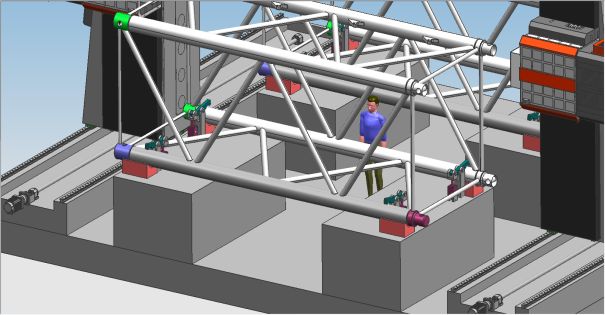
2.3. Ish qismini gidravlik siqish funktsiyasi
2.4Chiplarni olib tashlash va sovutish
Ish stolining har ikki tomonida spiral va tekis zanjirli chip konveyerlari o'rnatilgan va chiplar tsivilizatsiyalashgan ishlab chiqarishni amalga oshirish uchun spiral va zanjir plitalarining ikki bosqichi orqali oxirida avtomatik ravishda chip konveyeriga tushirilishi mumkin. Chip konveyerining sovutish suvi idishida sovutish nasosi mavjud bo'lib, u asbobning ishlashi va xizmat muddatini ta'minlash uchun asbobni tashqi sovutish uchun ishlatilishi mumkin va sovutish suvi qayta ishlanishi mumkin.
3. To'liq raqamli raqamli boshqaruv tizimi:
3.1. Chipni sindirish funktsiyasi bilan chipni sindirish vaqti va chipni sindirish davri inson-mashina interfeysida o'rnatilishi mumkin.
3.2. Asbobni ko'tarish funktsiyasi bilan asbobni ko'tarish masofasi odam-mashina interfeysida o'rnatilishi mumkin. Qayta ishlash bu masofaga yetganda, asbob tezda ko'tariladi, so'ngra chiplar tashlanadi va keyin burg'ulash yuzasiga tez oldinga o'tadi va avtomatik ravishda ishga aylanadi.
3.3. Markazlashtirilgan boshqaruv qutisi va qo'l bloki raqamli boshqaruv tizimini qabul qiladi va USB interfeysi va LCD suyuq kristalli displey bilan jihozlangan. Dasturlash, saqlash, displey va aloqani osonlashtirish uchun operatsion interfeysda odam-mashina dialogi, xatolarni qoplash va avtomatik signalizatsiya kabi funktsiyalar mavjud.
3.4. Uskunalar ishlov berishdan oldin teshik holatini oldindan ko'rish va qayta tekshirish funktsiyasiga ega va operatsiya juda qulay.
4. Avtomatik moylash
Mashina asboblarining nozik chiziqli hidoyat relslari, nozik sharli vintlar juftlari va boshqa yuqori aniqlikdagi harakat juftlari avtomatik soqol tizimlari bilan jihozlangan. Avtomatik moylash pompasi bosimli yog'ni chiqaradi va miqdoriy moylash moslamasi yog' kamerasiga kiradi. Yog 'kamerasini moy bilan to'ldirgandan so'ng, tizim bosimi 1,4-1,75Mpa ga ko'tarilganda, tizimdagi bosim tugmasi yopiladi, nasos to'xtaydi va bir vaqtning o'zida tushirish valfi tushiriladi. Yo'ldagi yog 'bosimi 0,2Mpa dan pastga tushganda, miqdoriy moylash moslamasi moylash joyini to'ldirishni boshlaydi va bitta moyni to'ldirishni yakunlaydi. Miqdoriy yog 'injektorining aniq yog' bilan ta'minlanishi va tizim bosimining aniqlanishi tufayli yog 'ta'minoti ishonchli bo'lib, har bir kinematik juftning yuzasida yog' plyonkasi mavjudligini ta'minlaydi, ishqalanish va aşınmayı kamaytiradi va shikastlanishning oldini oladi. haddan tashqari issiqlikdan kelib chiqqan ichki tuzilish , dastgohning aniqligi va ishlash muddatini ta'minlash. Toymasin hidoyat rels juftligi bilan solishtirganda, ushbu dastgohda ishlatiladigan dumaloq chiziqli yo'naltiruvchi rels juftligi bir qator afzalliklarga ega:
① Yuqori harakat sezuvchanligi, aylanma yo'riqnomaning ishqalanish koeffitsienti kichik, atigi 0,0025-0,01 va haydash kuchi sezilarli darajada kamayadi, bu faqat 1 oddiy mashinaga teng. /10. ② Dinamik va statik ishqalanish o'rtasidagi farq juda kichik va keyingi ishlash juda yaxshi, ya'ni haydash signali va mexanik harakat o'rtasidagi vaqt oralig'i juda qisqa, bu javob tezligi va sezgirligini oshirishga yordam beradi. raqamli boshqaruv tizimi.
③U yuqori tezlikda chiziqli harakatga mos keladi va uning bir lahzali tezligi toymasin hidoyat relslaridan taxminan 10 baravar yuqori. ④ Bu bo'shliqsiz harakatni amalga oshirishi va mexanik tizimning harakat qattiqligini yaxshilashi mumkin. ⑤Professional ishlab chiqaruvchilar tomonidan ishlab chiqarilgan, yuqori aniqlik, yaxshi ko'p qirrali va oson parvarishlash.
5. Eksa lazer tekshiruvi:
Bosmanning har bir mashinasi Buyuk Britaniyadagi RENISHAW kompaniyasining lazer interferometri tomonidan dinamik, statik barqarorlik va ishlov berishning aniqligini ta'minlash uchun pitch xatosi, teskari tebranish, joylashishni aniqlash aniqligi, takroriy joylashishni aniqlash aniqligi va boshqalarni aniq tekshirish va kompensatsiya qilish uchun kalibrlangan. mashina. Ballbar tekshiruvi Har bir mashina haqiqiy aylana aniqligini va mashinaning geometrik aniqligini kalibrlash uchun Britaniyaning RENISHAW kompaniyasining ballbaridan foydalanadi va 3D ishlov berish aniqligi va dastgohning dumaloq aniqligini ta'minlash uchun bir vaqtning o'zida dumaloq kesish tajribalarini o'tkazadi.


6.Mashina asboblari muhiti:
6.1. Uskunalardan foydalanish uchun atrof-muhit talablari
Atrof-muhit haroratining doimiy darajasini saqlab turish nozik ishlov berish uchun muhim omil hisoblanadi.
(1) Foydalanish mumkin bo'lgan atrof-muhit harorati talabi -10 ℃ ~ 35 ℃, atrof-muhit harorati 20 ℃ bo'lsa, namlik 40 ~ 75% bo'lishi kerak.
(2) Mashina asbobining statik aniqligini belgilangan diapazonda saqlash uchun tegmaslik muhit harorati 15 ° C dan 25 ° C gacha va harorat farqi talab qiladi.
±2°C/24 soatdan oshmasligi kerak.
6.1.2. Quvvat manbai kuchlanishi: 3 faza, 380V, kuchlanishning ±10% o'zgarishi oralig'ida, quvvat manbai chastotasi: 50HZ.
6.1.3. Foydalanish sohasidagi kuchlanish beqaror bo'lsa, dastgohning normal ishlashini ta'minlash uchun dastgoh barqarorlashtirilgan quvvat manbai bilan jihozlangan bo'lishi kerak.
6.1.4. Mashinada ishonchli topraklama bo'lishi kerak: topraklama simi mis sim, sim diametri 10 mm² dan kam bo'lmasligi kerak va topraklama qarshiligi 4 Ō dan kam bo'lishi kerak.
6.1.5. Uskunaning normal ishlashini ta'minlash uchun, agar havo manbasining siqilgan havosi havo manbasining talablariga javob bermasa, uni dastgohga o'rnatish kerak.
Havodan oldin havo manbasini tozalash moslamasini (namni tozalash, yog'sizlantirish, filtrlash) qo'shing.
6.1.6. Uskunani to'g'ridan-to'g'ri quyosh nuri, tebranish va issiqlik manbalari, yuqori chastotali generatorlar, elektr payvandlash mashinalari va boshqalardan uzoqroq tuting, buning natijasida dastgohlar ishlab chiqarishda nosozliklar yoki dastgohlar aniqligi yo'qolishi mumkin.
7. TTexnik parametrlar:
| Model | 6025-6Z | |
| Ish qismini qayta ishlash hajmi | Uzunlik × kenglik × balandlik (mm) | 6000×2300×2300 |
| Gantry maksimal oziqlantirish | Kengligi (mm) | 6800 |
| ish stolining o'lchami | Uzunlik X Kenglik (mm) | 3000*1000 =4 |
| Ustun sayohati | Ustun oldinga va orqaga siljiydi (mm) | 7000 |
| Ikki rampani yuqoriga va pastga ko'taring | Ramning yuqoriga va pastga tushishi (mm) | 2500 |
| Shpindel markazidan stol tekisligiga masofa | 0-2500 mm | |
|
Gorizontal ram tipidagi burg'ulash boshi quvvat boshi bir ikkita
| Miqdori (2) | 2 |
| Shpindel konusi | BT50 | |
| Burg'ulash diametri (mm) | PH2-P60 | |
| Bog'lanish diametri (mm) | M3-M30 | |
| Ish mili tezligi (d/min) | 30 ~ 5000 | |
| Servo shpindelli vosita quvvati (kVt) | 37*2 | |
| Ikki mil uchi orasidagi chap va o'ng masofa | 5800-6800 mm | |
| Qo'chqorning chap va o'ng zarbasi (mm) | 500 | |
| Ikki tomonlama joylashishni aniqlashning aniqligi | 300mm * 300mm | ±0,025 |
| Ikki tomonlama takroriy joylashishni aniqlash aniqligi | 300mm * 300mm | ±0,02 |
| Mashina asboblari o'lchamlari | Uzunlik × kenglik × balandlik (mm) | Chizmalarga ko'ra (agar dizayn jarayonida o'zgarishlar bo'lsa, biz sizni xabardor qilamiz) |
| Brüt vazn (t) | 72T | |